Difference between revisions of "2016 Electrical OSMC"
Jump to navigation
Jump to search
(Tag: Visual edit) |
(→Other Components) (Tag: Visual edit) |
||
| Line 163: | Line 163: | ||
* [[2016 Electrical Encoder|Encoder]] | * [[2016 Electrical Encoder|Encoder]] | ||
* [[2016 Electrical E-Stop|E-Stop]] | * [[2016 Electrical E-Stop|E-Stop]] | ||
| − | * [[2016 Electrical | + | * [[2016 Electrical Light Shield|Light Shield]] |
== References == | == References == | ||
Revision as of 11:27, 10 November 2016
Contents
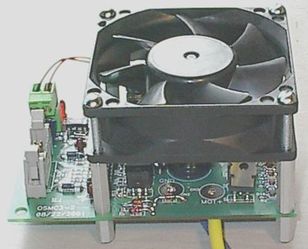
OSMC (Open-Source Motor Controller)

OSMC with fan for head dissipation. <ref name=":0">http://www.robotpower.com/products/osmc_info.html</ref>

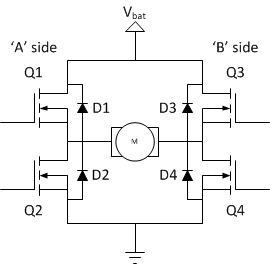
H-bridge motor controller. <ref>http://www.modularcircuits.com/blog/articles/h-bridge-secrets/h-bridges-the-basics/</ref>
The OSMC module allows interfacing with the motors using PWM to control speed and digital logic to control direction. Two are used for each drive wheel.
Connections: 10-pin Header (logic interface)
|
Pin |
Function |
Signal Type |
Connected Device |
|
1 |
Power |
DC (12V) (VCC) |
Motor Fuse |
|
2 |
Power |
DC (12V) |
Motor Fuse |
|
3 |
|||
|
4 |
Disable |
Logic (input) |
Motor Shield |
|
5 |
AHI (A-side high input) |
VCC (logic high) |
Motor Shield |
|
6 |
ALI |
PWM (input) |
Motor Shield |
|
7 |
BHI |
VCC (logic high) |
Motor Shield |
|
8 |
BLI |
PWM (input) |
Motor Shield |
|
9 |
Ground (GND) |
Ground |
GND bar |
|
10 |
Ground (GND) |
Ground |
GND bar |
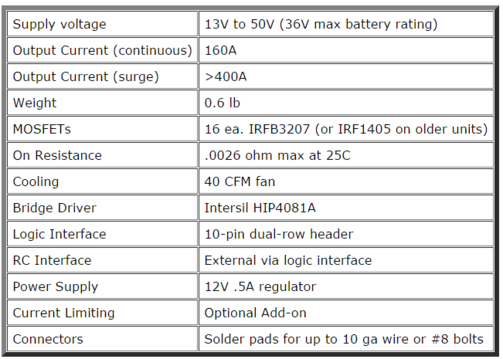
Datasheet

Osmc data table. <ref>http://www.robotpower.com/products/osmc_info.html</ref>
Notes
Full Schematic
Full Schematic PDF<ref name=":0" />