Difference between revisions of "2016 Electrical OSMC"
Jump to navigation
Jump to search
(Tag: Visual edit) |
Joldenburg6 (talk | contribs) m (Categorize) |
||
| (8 intermediate revisions by one other user not shown) | |||
| Line 1: | Line 1: | ||
== OSMC (Open-Source Motor Controller) == | == OSMC (Open-Source Motor Controller) == | ||
| − | [[File:Osmc.jpg|thumb|308x308px|OSMC]] | + | [[File:Osmc.jpg|thumb|308x308px|OSMC with fan for heat dissipation. <ref name=":0">http://www.robotpower.com/products/osmc_info.html</ref>]] |
| − | [[File:H-bridge.png|thumb|271x271px|H-bridge motor controller]] | + | [[File:H-bridge.png|thumb|271x271px|H-bridge motor controller. <ref>http://www.modularcircuits.com/blog/articles/h-bridge-secrets/h-bridges-the-basics/</ref>]] |
| − | The OSMC module allows interfacing with the motors using PWM to control speed and digital logic to control direction. Two are used for each drive wheel. | + | The OSMC module allows interfacing with the motors using PWM to control speed and digital logic to control direction. Two are used for each drive wheel. Essentially, the OSMC is an H-bridge motor controller with additional functionalities, such as high power operation. |
== Connections: 10-pin Header (logic interface) == | == Connections: 10-pin Header (logic interface) == | ||
| Line 8: | Line 8: | ||
| | | | ||
| − | Pin | + | '''Pin''' |
| | | | ||
| − | Function | + | '''Function''' |
| | | | ||
| − | Signal Type | + | '''Signal Type''' |
| | | | ||
| − | Connected Device | + | '''Connected Device''' |
|- | |- | ||
| Line 30: | Line 30: | ||
| | | | ||
| − | Motor | + | Motor Shield |
|- | |- | ||
| Line 43: | Line 43: | ||
| | | | ||
| − | Motor | + | Motor Shield |
|- | |- | ||
| Line 131: | Line 131: | ||
| | | | ||
| − | + | Motor Shield | |
|- | |- | ||
| Line 144: | Line 144: | ||
| | | | ||
| − | + | Motor Shield | |
|} | |} | ||
| + | Other Connections | ||
| + | {| class="wikitable" | ||
| + | |Ground | ||
| + | |GND | ||
| + | |Ground bar | ||
| + | |- | ||
| + | |Power | ||
| + | |24V | ||
| + | |Motor Fuses | ||
| + | |} | ||
| + | |||
| + | == Datasheet == | ||
| + | [[File:Osmc data.PNG|left|thumb|503x503px|Osmc data table. <ref>http://www.robotpower.com/products/osmc_info.html</ref>]] | ||
| + | |||
| + | == Notes == | ||
| + | |||
| + | == Full Schematic == | ||
| + | [[:File:Osmc3-22sch-clean.pdf|Full Schematic PDF]]<ref name=":0" /> | ||
| + | |||
| + | == Other Components == | ||
| + | * [[2016 Electrical Flow Chart|Flow Chart]] | ||
| + | * [[2016 Electrical Motor Shield|Motor Shield]] | ||
| + | * [[2016 Electrical Motor|Motor]] | ||
| + | * [[2016 Electrical Motor Fuses|Motor Fuses]] | ||
| + | * [[2016 Electrical Encoder|Encoder]] | ||
| + | * [[2016 Electrical E-Stop|E-Stop]] | ||
| + | * [[2016 Electrical Light Shield|Light Shield]] | ||
| − | + | [[Category:IGVC]][[Category:2016-2017]] | |
Latest revision as of 21:58, 13 June 2018
Contents
OSMC (Open-Source Motor Controller)

OSMC with fan for heat dissipation. <ref name=":0">http://www.robotpower.com/products/osmc_info.html</ref>

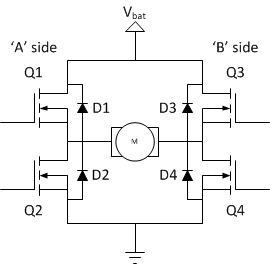
H-bridge motor controller. <ref>http://www.modularcircuits.com/blog/articles/h-bridge-secrets/h-bridges-the-basics/</ref>
The OSMC module allows interfacing with the motors using PWM to control speed and digital logic to control direction. Two are used for each drive wheel. Essentially, the OSMC is an H-bridge motor controller with additional functionalities, such as high power operation.
Connections: 10-pin Header (logic interface)
|
Pin |
Function |
Signal Type |
Connected Device |
|
1 |
Power |
DC (12V) (VCC) |
Motor Shield |
|
2 |
Power |
DC (12V) |
Motor Shield |
|
3 |
|||
|
4 |
Disable |
Logic (input) |
Motor Shield |
|
5 |
AHI (A-side high input) |
VCC (logic high) |
Motor Shield |
|
6 |
ALI |
PWM (input) |
Motor Shield |
|
7 |
BHI |
VCC (logic high) |
Motor Shield |
|
8 |
BLI |
PWM (input) |
Motor Shield |
|
9 |
Ground (GND) |
Ground |
Motor Shield |
|
10 |
Ground (GND) |
Ground |
Motor Shield |
Other Connections
| Ground | GND | Ground bar |
| Power | 24V | Motor Fuses |
Datasheet

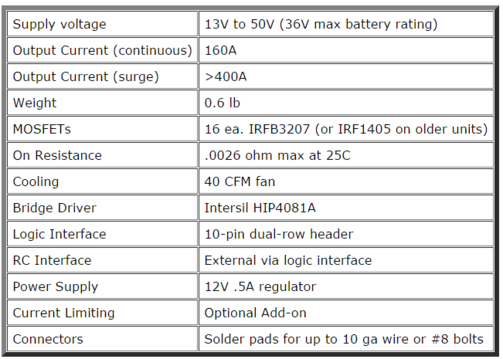
Osmc data table. <ref>http://www.robotpower.com/products/osmc_info.html</ref>
Notes
Full Schematic
Full Schematic PDF<ref name=":0" />