Difference between revisions of "RoboCup"
Jump to navigation
Jump to search
(→Electrical) |
m (→Electrical) |
||
| Line 19: | Line 19: | ||
===Electrical=== | ===Electrical=== | ||
*Current System | *Current System | ||
| − | [[RoboCup Electrical 2014|RoboCup Electrical 2014]] | + | :[[RoboCup Electrical 2014|RoboCup Electrical 2014]] |
*Additional Resources | *Additional Resources | ||
Revision as of 04:24, 27 February 2014

The Georgia Tech RoboJackets RoboCup Small-Size League team competes in a 6-on-6 AI-driven soccer match against teams from around the world.
The field is equipped with two overhead cameras, which act as the primary information source for the selection of plays and tactics.
If you haven't already, subscribe to the RoboCup Mailing List.
Contents
Important Items
- RoboCup Small Size League (SSL) Website
- RoboJackets Learning
- System Archive
- Long Term Ideas
- Safe Li-Po Battery Disposal
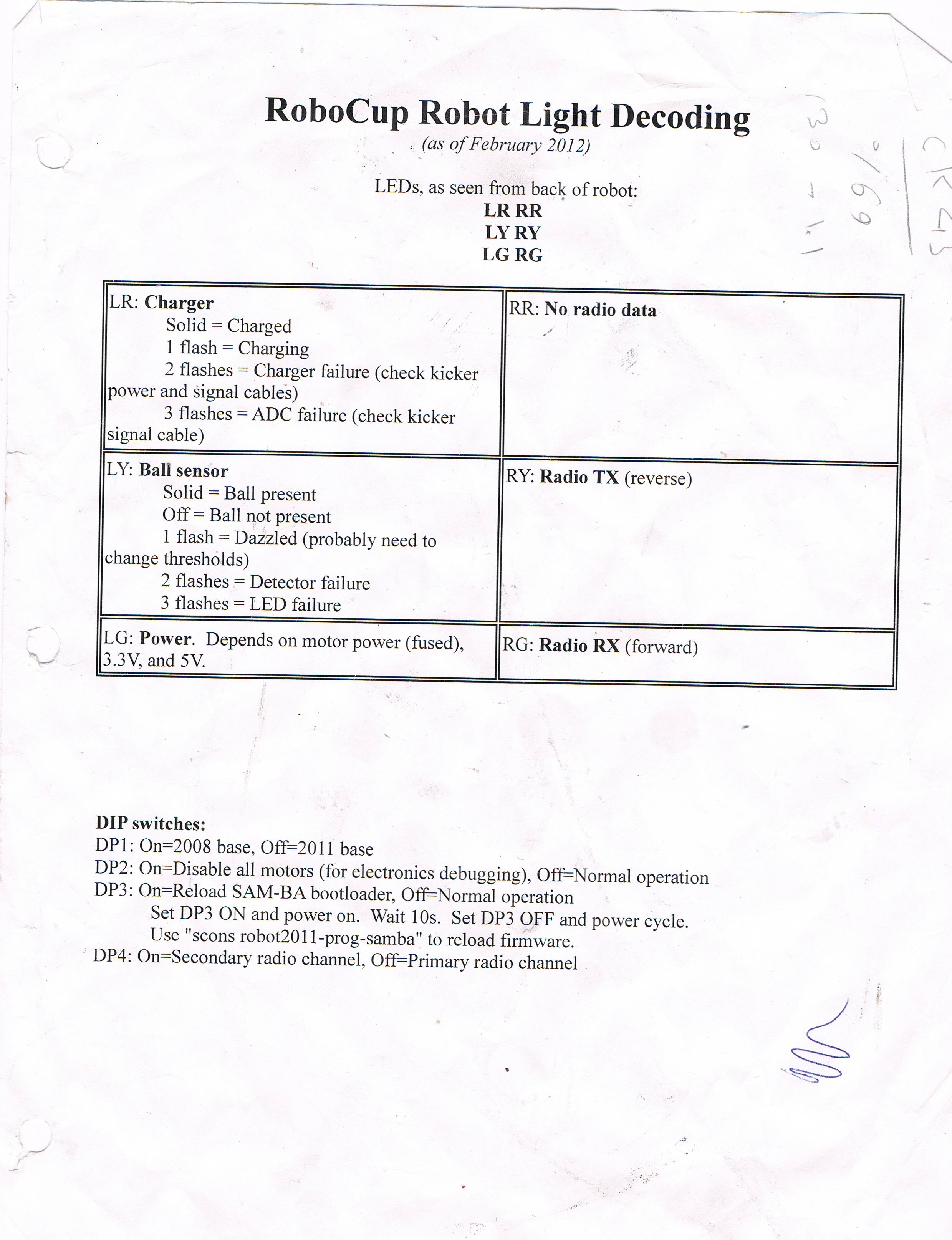
- LED Indicator Reference Sheet
{kind=link}
Sub-Teams
Electrical
- Current System
- Additional Resources
- RoboCup Electrical tutorial videos
- Testing a MOSFET
- How to be a great electrical engineer
- List of RoboCup Electrical wiki pages
- Useful Links
- CadSoft EAGLE
- How to use EAGLE
- PCB layout tutorial
- Gerber file export
- Control board EAGLE files (2011-rev-c | EaglePro v6.1.0)
- Soldering
- Instrumentation