Difference between revisions of "Waluigi"
Jump to navigation
Jump to search
| (7 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
{| class="wikitable" align="right" | {| class="wikitable" align="right" | ||
|- | |- | ||
| − | ! scope="row" colspan="2" style="background-color:# | + | ! scope="row" colspan="2" style="background-color:#e299ff" | Waluigi |
|- | |- | ||
| − | ! scope="row" colspan="2" | [[File: | + | ! scope="row" colspan="2" | [[File:waluigi.jpg|frameless|right|480x360px|(Highlight text)]] |
|- | |- | ||
! scope="row" style="text-align:left" | Year Of Creation | ! scope="row" style="text-align:left" | Year Of Creation | ||
| − | | {{{year| | + | | {{{year|2022-2023}}} |
|- | |- | ||
! scope="row" style="text-align:left" | Wins/Losses | ! scope="row" style="text-align:left" | Wins/Losses | ||
| − | | {{{winloss| | + | | {{{winloss|1/2}}} |
|- | |- | ||
| − | ! scope="row" colspan="2" style="background-color:# | + | ! scope="row" colspan="2" style="background-color:#e299ff" | Information and Statistics |
|- | |- | ||
! scope="row" style="text-align:left" | Weight Class | ! scope="row" style="text-align:left" | Weight Class | ||
| Line 17: | Line 17: | ||
|- | |- | ||
! scope="row" style="text-align:left" | Weapon Class | ! scope="row" style="text-align:left" | Weapon Class | ||
| − | | {{{weapc| | + | | {{{weapc|Vertical Spinner}}} |
|- | |- | ||
! scope="row" style="text-align:left" | Combined Wins/Losses | ! scope="row" style="text-align:left" | Combined Wins/Losses | ||
| − | | {{{winloss| | + | | {{{winloss|1/2}}} |
|- | |- | ||
|} | |} | ||
| − | + | Waluigi is a 3lb robot with a 2 wheel drive and a vertical beater bar spinner. | |
== Competitions == | == Competitions == | ||
| Line 30: | Line 30: | ||
=== [[State of Franklin Robot Rumble 2023|State of Franklin Robot Rumble 2023]] === | === [[State of Franklin Robot Rumble 2023|State of Franklin Robot Rumble 2023]] === | ||
| − | *Results: | + | *Results: 1-2 |
| − | **Bracket Style: | + | **Bracket Style: Double Elimination |
| − | ***[ | + | ***[https://www.youtube.com/live/NyuAEq0VtXA?feature=share&t=8420 Win vs. Feloni] |
| − | **** | + | ****Feloni is the other RoboJackets 3lb beater bar from this year |
| − | **** | + | ****Our weapon never spun up, as we turned the transmitter on with the stick halfway up |
| + | ****Driving was difficult, as it seemed to constantly lag and cut out | ||
| + | ****Feloni landed several big hits, but they ended up knocking themselves out | ||
| + | ***[https://www.youtube.com/live/NyuAEq0VtXA?feature=share&t=17652 Loss vs. Alpha Raptor II] | ||
| + | ****Alpha Raptor II is a lifter, which finished 4th overall | ||
| + | ****Its armor was mostly titanium, so we weren't able to do much damage | ||
| + | ****One side of our drive eventually failed and we were counted out | ||
| + | ***[https://www.youtube.com/watch?v=4-UbHw8eDzM Loss vs. Cherno Alpha] | ||
| + | ****Cherno Alpha is a FingerTech beater bar kit bot, which finished 7th overall | ||
| + | ****They box rushed us and took out one of our wheels soon after | ||
== Version == | == Version == | ||
| − | === | + | === Waluigi V1.0 === |
| − | Created by: <span style="color: rgb(0, 0, 0); font-family: sans-serif; font-size: 12.6999998092651px; line-height: 20.7999992370605px;"> | + | Created by: <span style="color: rgb(0, 0, 0); font-family: sans-serif; font-size: 12.6999998092651px; line-height: 20.7999992370605px;">Alexander King, Diego Ribe, Joshua Lee, Luke Shaw, William Van Slyke</span> |
{| border="1" cellspacing="1" cellpadding="1" style="width: 500px;" | {| border="1" cellspacing="1" cellpadding="1" style="width: 500px;" | ||
|- | |- | ||
| Drive Motors | | Drive Motors | ||
| − | | <span style="color: rgb(0, 0, 0); font-family: arial, sans, sans-serif; line-height: normal; white-space: pre-wrap;"> | + | | <span style="color: rgb(0, 0, 0); font-family: arial, sans, sans-serif; line-height: normal; white-space: pre-wrap;">BotKits 22mm DC Gearmotor</span><br/> |
|- | |- | ||
| Drive Motor Controllers | | Drive Motor Controllers | ||
| − | | | + | | Scorpion ESC |
|- | |- | ||
| Weapon Motor | | Weapon Motor | ||
| − | | | + | | BadAss 2814-1120Kv Brushless Motor |
|- | |- | ||
| Weapon Motor Controllers | | Weapon Motor Controllers | ||
| − | | | + | | Onyx 50A 2-4S Programmable Brushless Air ESC |
|- | |- | ||
| Receiver | | Receiver | ||
| Line 70: | Line 79: | ||
|- | |- | ||
| Max Weapon RPM | | Max Weapon RPM | ||
| − | | <span style="color: rgb(0, 0, 0); font-family: arial, sans, sans-serif; line-height: normal; white-space: pre-wrap;">( | + | | <span style="color: rgb(0, 0, 0); font-family: arial, sans, sans-serif; line-height: normal; white-space: pre-wrap;">11800 rpm (theoretical)</span><br/> |
|- | |- | ||
| Min Spin Up Time | | Min Spin Up Time | ||
| − | | ( | + | | 0.34 s (theoretical) |
|- | |- | ||
| Drive Speed | | Drive Speed | ||
| − | | | + | | Roughly 8 ft/s |
|} | |} | ||
==== Problems ==== | ==== Problems ==== | ||
| − | *( | + | *Weapon |
| − | * | + | **The ball bearings used in the weapon exploded from a weapon-on-weapon impact in our first fight |
| − | * | + | **The bolts attaching the weapon motor backed out (we should have used Loctite on them) |
| − | * | + | **The weapon was a bit weak, as we had to shave a lot of weight from it the night before the competition |
| + | *Chassis | ||
| + | **The chassis design was very heavy, which meant that we didn't have enough weight for wheel guards or other improvements | ||
| + | **The titanium wedge had too much ground clearance, so we weren't able to get under opponents | ||
| + | **The bolt on the inner part of the wedge got sheared off during our first match | ||
| + | *Drive | ||
| + | **Exposed wheels were a liability, as they could be easily attacked by opponents | ||
| + | *Electronics | ||
| + | **We had issues with the drive cutting out throughout the competition, which was caused by either a faulty drive ESC or the receiver | ||
| + | **The power switch was hard to access and we ended up stripping the bolt | ||
==== Good aspects ==== | ==== Good aspects ==== | ||
| − | * | + | *Weapon |
| − | * | + | **Aside from the first match, the weapon was very robust and didn't stop spinning |
| − | * | + | **We replaced the bearings with HDPE spacers mid-competition, which was janky but held up surprisingly well |
| − | * | + | *Chassis |
| + | **The chassis held up really well, as the only structural damage was the 1/8" aluminum back plate being slightly bent in | ||
| + | **The wedge did a good job at deflecting hits and didn't take much damage | ||
| + | *Drive | ||
| + | **We coated the wheels with latex, which gave us pretty good traction | ||
| + | **We were able to drive well while inverted and flip ourselves back over by running into a wall | ||
| + | *Electronics | ||
| + | **We left plenty of space for electronics, which made it easy to fit all of them in the robot | ||
==== Changes/Improvements ==== | ==== Changes/Improvements ==== | ||
| − | * | + | *Weapon |
| − | *( | + | **A lighter weapon motor would be helpful, as we initially planned to use one but weren't able to get it due to supply issues |
| − | * | + | **Using 3D printed timing pulleys would also reduce weight |
| − | * | + | **With that extra weight, we would probably increase the weight and size of the weapon |
| + | *Chassis | ||
| + | **Make the chassis out of a mix of aluminum and TPU (similar to Anomali), which would significantly reduce weight | ||
| + | **Add forks to get underneath other bots | ||
| + | *Drive | ||
| + | **Have the wheels set inside of the chassis, so they would be more protected | ||
== Gallery == | == Gallery == | ||
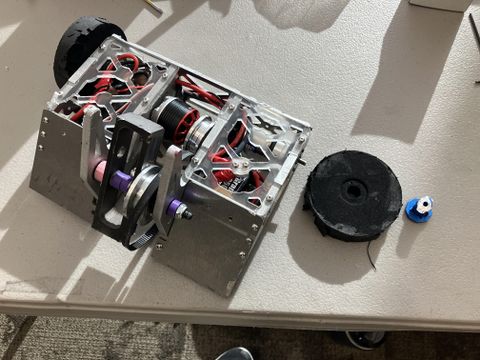
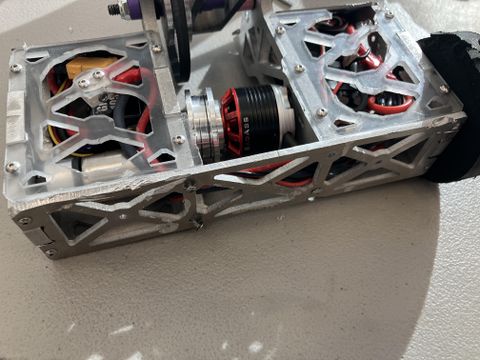
| − | + | Waluigi post-competition: | |
| − | + | [[File:WaluigiDamage1.jpg|frameless|left|480x360px|(Highlight text)]] | |
| − | + | [[File:WaluigiDamage2.jpg|frameless|left|480x360px|(Highlight text)]] | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Latest revision as of 00:00, 23 April 2023
| Waluigi | |
|---|---|
 | |
| Year Of Creation | 2022-2023 |
| Wins/Losses | 1/2 |
| Information and Statistics | |
| Weight Class | BeetleWeight |
| Weapon Class | Vertical Spinner |
| Combined Wins/Losses | 1/2 |
Waluigi is a 3lb robot with a 2 wheel drive and a vertical beater bar spinner.
Contents
Competitions
State of Franklin Robot Rumble 2023
- Results: 1-2
- Bracket Style: Double Elimination
- Win vs. Feloni
- Feloni is the other RoboJackets 3lb beater bar from this year
- Our weapon never spun up, as we turned the transmitter on with the stick halfway up
- Driving was difficult, as it seemed to constantly lag and cut out
- Feloni landed several big hits, but they ended up knocking themselves out
- Loss vs. Alpha Raptor II
- Alpha Raptor II is a lifter, which finished 4th overall
- Its armor was mostly titanium, so we weren't able to do much damage
- One side of our drive eventually failed and we were counted out
- Loss vs. Cherno Alpha
- Cherno Alpha is a FingerTech beater bar kit bot, which finished 7th overall
- They box rushed us and took out one of our wheels soon after
- Win vs. Feloni
- Bracket Style: Double Elimination
Version
Waluigi V1.0
Created by: Alexander King, Diego Ribe, Joshua Lee, Luke Shaw, William Van Slyke
| Drive Motors | BotKits 22mm DC Gearmotor |
| Drive Motor Controllers | Scorpion ESC |
| Weapon Motor | BadAss 2814-1120Kv Brushless Motor |
| Weapon Motor Controllers | Onyx 50A 2-4S Programmable Brushless Air ESC |
| Receiver | Hobby King 2.4Ghz Receiver 6Ch V2 |
| Remote Control | Hobby King 2.4Ghz 6Ch Tx and Rx V2 |
| Battery | MaxAmps 3s 1050mah |
| Max Weapon RPM | 11800 rpm (theoretical) |
| Min Spin Up Time | 0.34 s (theoretical) |
| Drive Speed | Roughly 8 ft/s |
Problems
- Weapon
- The ball bearings used in the weapon exploded from a weapon-on-weapon impact in our first fight
- The bolts attaching the weapon motor backed out (we should have used Loctite on them)
- The weapon was a bit weak, as we had to shave a lot of weight from it the night before the competition
- Chassis
- The chassis design was very heavy, which meant that we didn't have enough weight for wheel guards or other improvements
- The titanium wedge had too much ground clearance, so we weren't able to get under opponents
- The bolt on the inner part of the wedge got sheared off during our first match
- Drive
- Exposed wheels were a liability, as they could be easily attacked by opponents
- Electronics
- We had issues with the drive cutting out throughout the competition, which was caused by either a faulty drive ESC or the receiver
- The power switch was hard to access and we ended up stripping the bolt
Good aspects
- Weapon
- Aside from the first match, the weapon was very robust and didn't stop spinning
- We replaced the bearings with HDPE spacers mid-competition, which was janky but held up surprisingly well
- Chassis
- The chassis held up really well, as the only structural damage was the 1/8" aluminum back plate being slightly bent in
- The wedge did a good job at deflecting hits and didn't take much damage
- Drive
- We coated the wheels with latex, which gave us pretty good traction
- We were able to drive well while inverted and flip ourselves back over by running into a wall
- Electronics
- We left plenty of space for electronics, which made it easy to fit all of them in the robot
Changes/Improvements
- Weapon
- A lighter weapon motor would be helpful, as we initially planned to use one but weren't able to get it due to supply issues
- Using 3D printed timing pulleys would also reduce weight
- With that extra weight, we would probably increase the weight and size of the weapon
- Chassis
- Make the chassis out of a mix of aluminum and TPU (similar to Anomali), which would significantly reduce weight
- Add forks to get underneath other bots
- Drive
- Have the wheels set inside of the chassis, so they would be more protected
Gallery
Waluigi post-competition:

