Difference between revisions of "RoboCup Mechanical 2015"
m (fixed category tag) |
|||
| (55 intermediate revisions by 5 users not shown) | |||
| Line 1: | Line 1: | ||
| − | This page houses the 2015 [http://wiki.robojackets.org/ | + | This page houses the 2015 [http://wiki.robojackets.org/w/RoboCup RoboCup] Mechanical efforts. Mechanical tasks for the 2015 competition year can be most easily summarized as a complete redesign of the SSL fleet. |
| − | |||
| − | |||
| − | |||
| − | |||
| + | Mechanical team meets Tuesday, 6:30-9pm Sunday, 1-5pm. More hours will be announced as deadlines approach. [[File:Enlightenment.gif|frameless|right|Enlightenment.gif]] | ||
| + | <p style="text-align: right"><span style="text-align: right; line-height: 1.6"> </span></p> | ||
== Background == | == Background == | ||
| Line 25: | Line 23: | ||
<span style="font-size: small; line-height: 20.7999992370605px">The team for the 2015 competition year has met several times to discuss the primary goals for a new fleet of robots. These requirements are outlined below, in order of highest priority to lowest priority.</span> | <span style="font-size: small; line-height: 20.7999992370605px">The team for the 2015 competition year has met several times to discuss the primary goals for a new fleet of robots. These requirements are outlined below, in order of highest priority to lowest priority.</span> | ||
| − | + | #Encoders on the motors | |
| − | + | #Robust drivetrain mounts | |
| − | + | #Damped dribbler | |
| − | + | #Lower profile solenoids | |
| − | + | #Superior traction/grip for the wheels | |
| − | + | #Robust shell design | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
=== Secondary Goals === | === Secondary Goals === | ||
| Line 41: | Line 34: | ||
The team has also considered other desired characteristics of the robots that are not necessarily competition-oriented goals. The list is below (in no particular order). | The team has also considered other desired characteristics of the robots that are not necessarily competition-oriented goals. The list is below (in no particular order). | ||
| − | + | #Improved tolerances for the omniwheel (previous designs have significant play in this subsystem) | |
| − | + | #Improved aesthetics for the robot shell | |
| − | + | #Ease of attachment/removal of electrical boards | |
| − | + | #Low center of gravity | |
| − | |||
== Specifications == | == Specifications == | ||
| Line 54: | Line 46: | ||
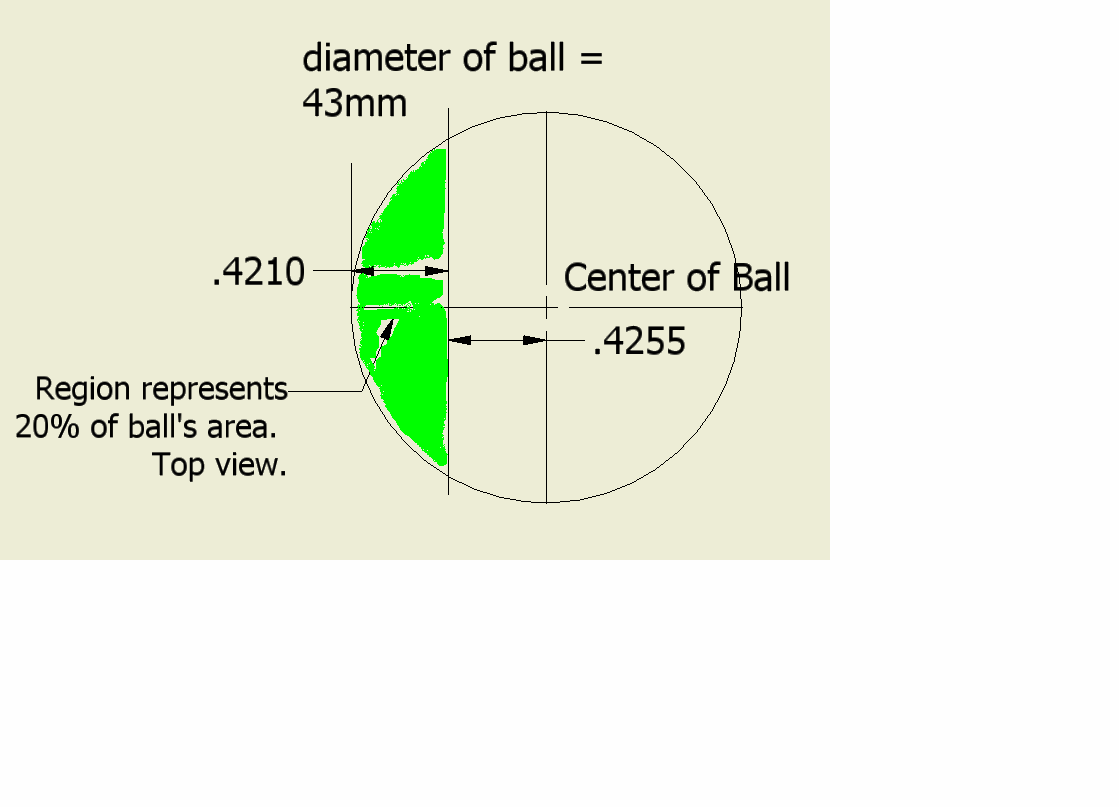
*No more than 20% of the ball's area (seen from top view) may be occupied by the robot - a critical Robocup SSL Rule | *No more than 20% of the ball's area (seen from top view) may be occupied by the robot - a critical Robocup SSL Rule | ||
| − | + | *see [http://wiki.robojackets.org/mediawiki/images/c/c8/Ball_sketch.PNG http://wiki.robojackets.org/mediawiki/images/c/c8/Ball_sketch.PNG] | |
== Mechanical Systems == | == Mechanical Systems == | ||
| Line 62: | Line 54: | ||
=== Drivetrain === | === Drivetrain === | ||
| − | :[http://wiki.robojackets.org/w/ | + | :[http://wiki.robojackets.org/w/RC15OmniWheel Omni Wheels]<br/>[http://wiki.robojackets.org/w/RC15Motors/Gears Motors/Gearing]<br/>[http://wiki.robojackets.org/w/RC15DriveModule Drive Module]<br/> |
=== Integration === | === Integration === | ||
| Line 70: | Line 62: | ||
=== Ball Control === | === Ball Control === | ||
| − | :[http://wiki.robojackets.org/ | + | :[http://wiki.robojackets.org/w/RC15-FlatSolenoid Solenoid Development] |
| + | :[[RC08-Dribbler|Dribbler]]<br/>[[2015_Kicker|Kicker]]<br/>[[2015_Chipper|Chipper]]<br/>[http://wiki.robojackets.org/mediawiki/RC08BallSens Ball Sensor]<br/> | ||
=== Testing === | === Testing === | ||
:[http://wiki.robojackets.org/mediawiki/RC08METestRig Test Rig]<br/><br/> | :[http://wiki.robojackets.org/mediawiki/RC08METestRig Test Rig]<br/><br/> | ||
| + | |||
| + | == Machining Notes == | ||
| + | |||
| + | *[[RC_Water_Jet|Water Jetting]] | ||
== Schedule == | == Schedule == | ||
| − | *Delivery of Prototype - End of | + | *Motors shipment date - March 26, 2015 |
| − | *Delivery of Fleet - End of | + | *Delivery of Prototype - End of March, beginning of April 2016 |
| + | *Delivery of Fleet - End of April 2015 | ||
== Meetings == | == Meetings == | ||
Attendance information is logged on paper for every meeting and submitted to the College of Computing for record-keeping. | Attendance information is logged on paper for every meeting and submitted to the College of Computing for record-keeping. | ||
| + | |||
| + | *[[Minutes_Log|Minutes Log]] | ||
== Documentation == | == Documentation == | ||
| Line 89: | Line 89: | ||
== Testing == | == Testing == | ||
| − | [http://wiki.robojackets.org/mediawiki/RoboCup | + | [http://wiki.robojackets.org/mediawiki/RoboCup Testing RoboCup Testing] |
| + | |||
| + | == General Specifications == | ||
| + | |||
| + | === Coordinate system:[[File:Wheel Angles.jpeg|thumb|center|600px|Coordinate System and Wheel Angles]] === | ||
| + | |||
| + | *Origin at the very center of the bottom plate, 0.25" below it in the y axis (height) | ||
| + | *The Z axis is oriented towards the rear, so the mouth is in negative | ||
| + | |||
| + | === === | ||
| + | |||
| + | *The X axis is oriented towards the right of the robot | ||
| + | |||
| + | === Mass: === | ||
| + | |||
| + | *4.68 bl mas | ||
| + | |||
| + | === Mass Moment of Inertia: === | ||
| + | |||
| + | *Ixx = 18.5298 lbmass in<sup>2</sup> | ||
| + | |||
| + | === === | ||
| + | |||
| + | *Ixy = -0.459 lbmass in<sup>2</sup> | ||
| + | *Ixz = 0.089 lbmass in<sup>2</sup> | ||
| + | *Iyy = 25.488 lbmass in<sup>2</sup> | ||
| + | *Iyz = -0.159 lbmass in<sup>2</sup> | ||
| + | *Izz = 17.66 lbmass in<sup>2</sup> | ||
| + | |||
| + | === Center of Mass: === | ||
| + | |||
| + | *x = -0.0009. | ||
| + | *z = -0.3 | ||
| + | |||
| + | === Wheel Placement: === | ||
| + | |||
| + | ==== Wheel Angles: ==== | ||
| + | |||
| + | *The rear wheels are oriented at 45� from the z axis | ||
| + | *The front wheels are oriented at 83� from the rear motors | ||
| + | |||
| + | ==== Wheel Distance: ==== | ||
| + | |||
| + | The contact point with of the omniwheel and the surface is 3.144" from the center axis. | ||
| + | |||
| + | === === | ||
== Quick Notes == | == Quick Notes == | ||
| Line 97: | Line 142: | ||
***Single-size field: 6050mm x 4050mm | ***Single-size field: 6050mm x 4050mm | ||
***Double-size field: 8090mm x 6050mm | ***Double-size field: 8090mm x 6050mm | ||
| − | **For the | + | **For the 2015 competition year, the field size is locked in as the "Double-size field": 8090mm x 6050mm |
*Max ball speed - 8 m/s | *Max ball speed - 8 m/s | ||
*Ball diameter - 43 mm | *Ball diameter - 43 mm | ||
| Line 103: | Line 148: | ||
*Ball material - DuPont Surlyn Ionomer [http://www2.dupont.com/Surlyn/en_US/ Dupont's Surlyn Page] | *Ball material - DuPont Surlyn Ionomer [http://www2.dupont.com/Surlyn/en_US/ Dupont's Surlyn Page] | ||
*Coefficient of static friction of golf ball on felt carpet - .66 | *Coefficient of static friction of golf ball on felt carpet - .66 | ||
| − | ***last two points from Cornell 2003 Mechanical Documentation | + | ** |
| + | *last two points from Cornell 2003 Mechanical Documentation | ||
== Useful Links == | == Useful Links == | ||
| − | * | + | *To be completed and appended to very soon |
| − | + | [[Category:RC Mechanical]] [[Category:2014-2015]] | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | [[Category: | ||
Latest revision as of 21:37, 24 May 2020
This page houses the 2015 RoboCup Mechanical efforts. Mechanical tasks for the 2015 competition year can be most easily summarized as a complete redesign of the SSL fleet.
Mechanical team meets Tuesday, 6:30-9pm Sunday, 1-5pm. More hours will be announced as deadlines approach.

Contents
Background
Current Robots
The team has taken part in RoboCup every year since 2008*. Two different fleets of robots are used: a fleet designed in 2008, and a fleet designed in 2011. The 2008 fleet sports a solenoid powered kicker mechanism and a fixed dribbler. The 2011 fleet sports solenoid powered kicker AND chipper mechanisms, along with a fixed dribbler and encoders on the motors.
Previous Issues
Due to an error in the tolerances of shaft components for the 2011 fleet, the drivetrain of these robots have suffered tremendously, resulting in decayed performance of the motors. This renders mostly all 2011 robots functionally incapable. Thus, the most reliable robots have been those designed in 2008. However, the 2008 robots lack encoders, and without these sensors, this makes control of the robots significantly more challenging for the software team.
Improvements
Due to these challenges, it has been determined that a complete rebuild of the robots is required to continue to be competitive in the RoboCup SSL. Particular emphasis is being placed on designing passive mechanisms that aid the software team in having finer control over the robots and the ball.
Requirements
Primary Goals
The team for the 2015 competition year has met several times to discuss the primary goals for a new fleet of robots. These requirements are outlined below, in order of highest priority to lowest priority.
- Encoders on the motors
- Robust drivetrain mounts
- Damped dribbler
- Lower profile solenoids
- Superior traction/grip for the wheels
- Robust shell design
Secondary Goals
The team has also considered other desired characteristics of the robots that are not necessarily competition-oriented goals. The list is below (in no particular order).
- Improved tolerances for the omniwheel (previous designs have significant play in this subsystem)
- Improved aesthetics for the robot shell
- Ease of attachment/removal of electrical boards
- Low center of gravity
Specifications
- Ball speed after being kicked - 8 m/s
- Dribbler bar speed - 8000 rpm
- Compress time (time for dribbler to absorb ball's energy and compress) - .2 seconds
- No more than 20% of the ball's area (seen from top view) may be occupied by the robot - a critical Robocup SSL Rule
Mechanical Systems
Drivetrain
Integration
Ball Control
Testing
Machining Notes
Schedule
- Motors shipment date - March 26, 2015
- Delivery of Prototype - End of March, beginning of April 2016
- Delivery of Fleet - End of April 2015
Meetings
Attendance information is logged on paper for every meeting and submitted to the College of Computing for record-keeping.
Documentation
Testing
General Specifications
Coordinate system:

{kind=link}
- Origin at the very center of the bottom plate, 0.25" below it in the y axis (height)
- The Z axis is oriented towards the rear, so the mouth is in negative
- The X axis is oriented towards the right of the robot
Mass:
- 4.68 bl mas
Mass Moment of Inertia:
- Ixx = 18.5298 lbmass in2
- Ixy = -0.459 lbmass in2
- Ixz = 0.089 lbmass in2
- Iyy = 25.488 lbmass in2
- Iyz = -0.159 lbmass in2
- Izz = 17.66 lbmass in2
Center of Mass:
- x = -0.0009.
- z = -0.3
Wheel Placement:
Wheel Angles:
- The rear wheels are oriented at 45� from the z axis
- The front wheels are oriented at 83� from the rear motors
Wheel Distance:
The contact point with of the omniwheel and the surface is 3.144" from the center axis.
Quick Notes
- Field Size:
- For the 2014 year, two options were available for the field size:
- Single-size field: 6050mm x 4050mm
- Double-size field: 8090mm x 6050mm
- For the 2015 competition year, the field size is locked in as the "Double-size field": 8090mm x 6050mm
- For the 2014 year, two options were available for the field size:
- Max ball speed - 8 m/s
- Ball diameter - 43 mm
- Ball mass - 46 grams
- Ball material - DuPont Surlyn Ionomer Dupont's Surlyn Page
- Coefficient of static friction of golf ball on felt carpet - .66
- last two points from Cornell 2003 Mechanical Documentation
Useful Links
- To be completed and appended to very soon