Difference between revisions of "2016 Electrical Encoder"
Jump to navigation
Jump to search
(Tag: Visual edit) |
(Tag: Visual edit) |
||
| Line 1: | Line 1: | ||
== Rotary Encoder == | == Rotary Encoder == | ||
| − | [[File:Encoder.PNG|thumb| | + | [[File:Encoder.PNG|thumb|290x290px|Encoder]]Converts angular motion into a digital signal using two square waves in quadrature (90° out of phase). Using one for each drive wheel allows for accurate measurement of speed.[[File:Encoder2.PNG|thumb|483x483px|Encoder and rotary with dimensions.|center]] |
| − | |||
| − | Converts angular motion into a digital signal using two square waves in quadrature (90° out of phase). Using one for each drive wheel allows for accurate measurement of speed. | ||
== Connections (5-pin header) == | == Connections (5-pin header) == | ||
| Line 99: | Line 97: | ||
== Notes == | == Notes == | ||
Test bench in progress. | Test bench in progress. | ||
| + | |||
| + | == References == | ||
Revision as of 22:33, 9 November 2016
Rotary Encoder

Converts angular motion into a digital signal using two square waves in quadrature (90° out of phase). Using one for each drive wheel allows for accurate measurement of speed.

Connections (5-pin header)
|
Pin |
Function |
Signal Type |
Connected Device |
|
1 |
Ground |
GND |
Motor Shield |
|
2 |
-- |
-- |
-- |
|
3 |
A |
digital |
Motor Shield |
|
4 |
Power |
VCC (5V) |
Motor Shield |
|
5 |
B |
digital |
Motor Shield |
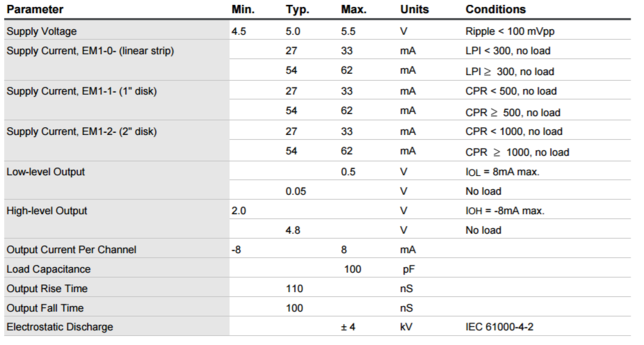
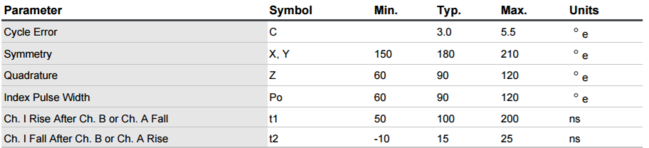
Datasheet

Encoder data table<ref>http://cdn.usdigital.com/assets/datasheets/EM1_datasheet.pdf?k=634991170254798537</ref>

Encoder data table<ref>http://cdn.usdigital.com/assets/datasheets/EM1_datasheet.pdf?k=634991170254798537</ref>
Notes
Test bench in progress.