Difference between revisions of "RoboCup Vision"
Jump to navigation
Jump to search
(added coordinate systems) |
|||
| Line 1: | Line 1: | ||
The vision system handles all camera communication and outputs static vision pose information. It runs as a service as a [http://en.wikipedia.org/wiki/User_Datagram_Protocol| UDP] server that provides vision data for interested parties. Once the vision service is started it begins to UDP broadcast the data for any interested parties to listen in on. | The vision system handles all camera communication and outputs static vision pose information. It runs as a service as a [http://en.wikipedia.org/wiki/User_Datagram_Protocol| UDP] server that provides vision data for interested parties. Once the vision service is started it begins to UDP broadcast the data for any interested parties to listen in on. | ||
| + | |||
| + | ==Coordinate Systems== | ||
| + | ===World Space=== | ||
| + | These coordinates are absolute to the field and do not change vantage point regardless of your current team. They are based on a top view of the field with yellow on the left, and blue on the right. (0,0) is at field center and angle is counter-clockwise positive. | ||
| + | |||
| + | <center>[[Image:world_space.png]]</center> | ||
| + | ===Team Space=== | ||
| + | These coordinates are relative to each team and are based from the team's baseline and centered on the goal. Angle is counter-clockwise positive. | ||
| + | |||
| + | <center>[[Image:team_space.png]]</center> | ||
Revision as of 01:58, 17 September 2007
The vision system handles all camera communication and outputs static vision pose information. It runs as a service as a UDP server that provides vision data for interested parties. Once the vision service is started it begins to UDP broadcast the data for any interested parties to listen in on.
Coordinate Systems
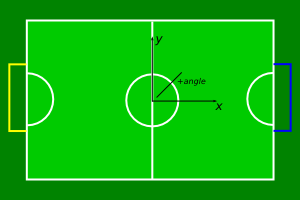
World Space
These coordinates are absolute to the field and do not change vantage point regardless of your current team. They are based on a top view of the field with yellow on the left, and blue on the right. (0,0) is at field center and angle is counter-clockwise positive.

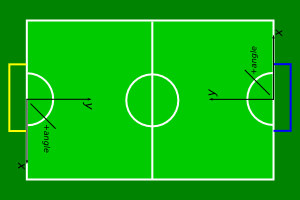
Team Space
These coordinates are relative to each team and are based from the team's baseline and centered on the goal. Angle is counter-clockwise positive.
