IKArm
Jump to navigation
Jump to search

Welcome to the Robojackets Inverse Kinematic Arm wiki!
Description
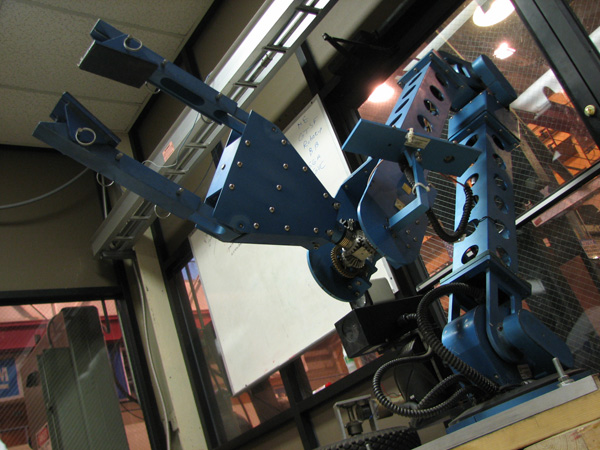
The goal of this project is to implement an inverse kinematics control algorithm to control the old 3 DOF robot arm.
Announcements
- 8/23/06 IK Arm meetings will resume soon. Check back for updates