Difference between revisions of "Pastrami"
Jump to navigation
Jump to search


Rangioletti3 (talk | contribs) |
Rangioletti3 (talk | contribs) (→November 2025 NHRL) |
||
| Line 28: | Line 28: | ||
**Jackalope has multiple configurations, but fought as a vert lifter for this fight. | **Jackalope has multiple configurations, but fought as a vert lifter for this fight. | ||
**Jackalope won via Judges Decision. Pastrami lost weapon functionality due to battery life, and Jackalope controlled the fight. | **Jackalope won via Judges Decision. Pastrami lost weapon functionality due to battery life, and Jackalope controlled the fight. | ||
| − | * | + | *Win vs No Name |
**No Name was too scare of us and forfeited. | **No Name was too scare of us and forfeited. | ||
*[https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-1&tournamentID=nhrl_nov25_3lb Loss vs Sir Slicey] | *[https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-1&tournamentID=nhrl_nov25_3lb Loss vs Sir Slicey] | ||
Revision as of 21:02, 12 November 2025
| Pastrami (2025) | |
|---|---|

| |
| Wins/Losses | 2/2 |
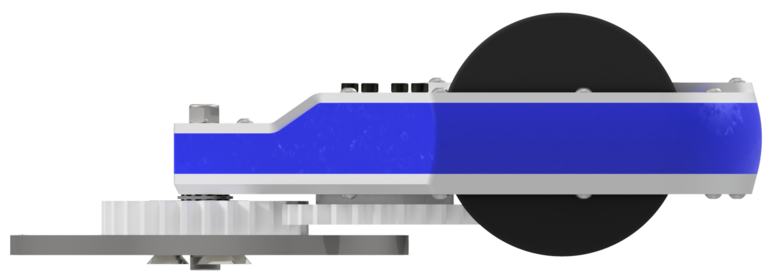
Pastrami is a drum beetleweight robot. Pastrami's design revolves around a large drum, made from the same drum stock as Cherri. Pastrami is made out of UHMW side rails, carbon fiber/titanium (depends on config) plates, and TPU.
Pastrami placed:
- Top 64 at November 2025 NHRL
Contents
Competitions Pastrami
November 2025 NHRL
Results: 2-2 - Made it to Round of 64
Bracket Style: Group Stage into Single Elimination
- Win vs Uch Funt
- Uch Funt is a beater kit bot.
- Pastrami won via knockout. No major damage to Pastrami
- Loss vs Jackalope
- Jackalope has multiple configurations, but fought as a vert lifter for this fight.
- Jackalope won via Judges Decision. Pastrami lost weapon functionality due to battery life, and Jackalope controlled the fight.
- Win vs No Name
- No Name was too scare of us and forfeited.
- Loss vs Sir Slicey
- Sir Slicey is a drisk.
- Sir Slicey won via knockout. Pastrami lost weapon functionality due to a broken spline. Sir Slicey went on to win the tournament.
Pastrami


Created by: Ryan De Angioletti, Rafael Sena, Ian Kwuan
Mentor: Jacques Wang
| Drive Motors | Dartbox V2 Ultra torque motors |
| Drive Motor Controllers | Wasp ESC |
| Weapon Motor | Cobra CM-4008/24 Multirotor Motor 600 Kv |
| Weapon Motor Controllers | RobotMatter 35A Blheli_32 ESC |
| Receiver | 2A mini Reciever for Flysky Controller 4Ch |
| Remote Control | Flysky FS-i6x 6-10Ch 2.4GHz RC transmitter |
| Battery | MaxAmps 4s 1050mah |
| Wheels | FingerTech Wheels (latex coated) |
| Max Weapon RPM | 6200 |
| Max Joules | 120 Joules |
| Max Bite | 0.5 inches |
| Min Spin Up Time | 0.9 seconds |
| Drive Speed | ~4ft per second |
Problems
- Weapon is underpowered, theoretically outputting a max of around 120 joules.
- Weapon did not sit level to the ground, angling upwards.
- Could have benefitted from better wheel protection.
- Anomali is incredibly slow, and has no pushing power.
- The internal spacing is incredibly cramped, and there is barely enough room for the electronics.
- Have to remove a drive side to plug in the battery.
Good aspects
- The geared weapon system is incredibly resilient.
- Our chassis held up remarkably well. The TPU protected the electronics and aluminum standoffs remarkably.
- Because we made several backup TPU chassis and 1/8 aluminum plates, we were able to swap out any part that took damage.
- The electronics held up very well. The smaller receiver and weapon esc allowed us to fit everything in the chassis.
Changes/Improvements
- Changing to timing belts should improve the efficiency of the weapon system.
- Use timing belts and 3D printed timing pulleys.
- Increase diameter of shoulder bolt.
- Chassis design was a bit overkill.
- Could decrease weight where protection is less needed.
- Increase space on interior for electronics.
- Add wheel protection
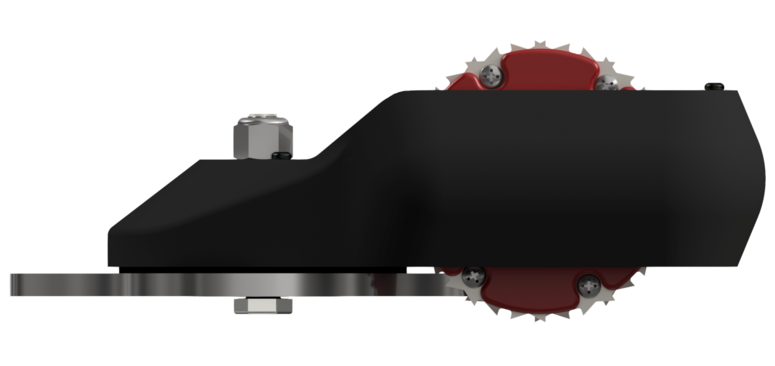
Anomalii


Created by: Ryan De Angioletti
Funded by: Invention Studio
| Drive Motors | Dartbox Viper 6mm motors |
| Drive Motor Controllers | JustCuz Robotics Dual ESC |
| Weapon Motor | Repeat 2836 1800kv brushless motor |
| Weapon Motor Controllers | RobotMatter 35A Blheli_32 ESC |
| Receiver | 2A mini Reciever for Flysky Controller 4Ch |
| Remote Control | Flysky FS-i6x 6-10Ch 2.4GHz RC transmitter |
| Battery | Galaxy 3s 850mah |
| Wheels | 1/16" Titanium Cleats |
| Max Weapon RPM | 9500 RPM |
| Max Joules | 275 Joules |
| Max Bite | 0.5 inches |
| Min Spin Up Time | 0.75 seconds |
| Drive Speed | ~12ft per second |
Problems
- Anomalii was originally designed for 4s, however had to change to 3s
- During testing, one of the Dartbox Gecko motors stalled, meaning Anomalii had to switch to Vipers which do not run on 4s.
- Left Viper motor seized after fourth fight
- Could have benefitted from better weapon gear protection
- TPU shell was significantly weaker the Anomali's shell, despite similar settings.
- This version of TPU was printed on Ultimaker, instead of Prusa.
- Motor shield rubs against weapon motor, causing white smoke to emit during long fights.
- The bot is hard to control after a hit.
Good aspects
- Much faster drive
- Much faster weapon
- When stuck against a wall, able to use the torque from instantly spinning up the weapon to escape.
Changes/Improvements
- Increase the gap between our weapon motor and motor shield.
- Improve TPU shell print quality (Print on Bamboo).
- Slim down wheel TPU print thickness to better fit in bot.
- Practice with drive and weapon.
- Increase bite.
Gallery




Early Iterations of Anomali



Iterations V1.5, V1.6, V1.7 of Anomali


Anomalii