Difference between revisions of "IKArm"
Jump to navigation
Jump to search
| Line 1: | Line 1: | ||
| − | [[Image:IKarm.jpg]] | + | [[Image:IKarm.jpg|right]] |
| + | |||
| + | Welcome to the '''[http://www.robojackets.org/ Robojackets]''' Inverse Kinematic Arm wiki! | ||
| + | |||
| + | ==Description== | ||
| + | The goal of this project is to implement an inverse kinematics control algorithm to control the old 3 DOF robot arm. | ||
| + | |||
| + | ==Announcements== | ||
| + | * 8/23/06 IK Arm meetings will resume soon. Check back for updates | ||
| + | |||
| + | |||
| + | ==Important Items== | ||
| + | |||
| + | |||
| + | ==Links== | ||
Revision as of 16:24, 23 August 2006

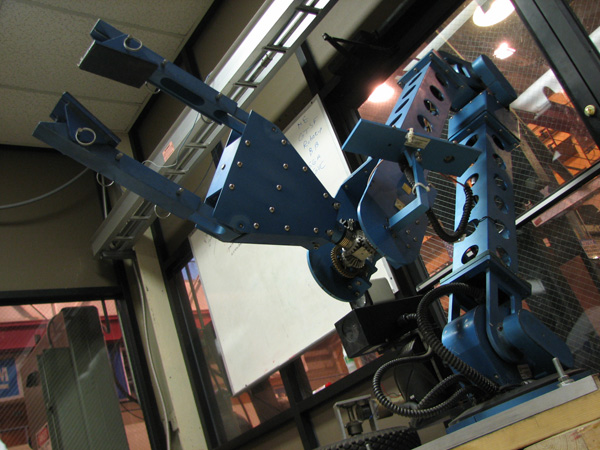
Welcome to the Robojackets Inverse Kinematic Arm wiki!
Description
The goal of this project is to implement an inverse kinematics control algorithm to control the old 3 DOF robot arm.
Announcements
- 8/23/06 IK Arm meetings will resume soon. Check back for updates